
While robots can master complex challenges like solving Rubik's cubes or exploring Martian terrain, they surprisingly falter at seemingly simple tasks such as flattening dough or handling chopsticks. Despite vast datasets and extensive training, these mechanical systems struggle with manipulative skills that young children acquire effortlessly.
Enter PlasticineLab, a groundbreaking simulation environment designed to revolutionize how artificial intelligence systems learn physical manipulation. Developed collaboratively by researchers from MIT, the MIT-IBM Watson AI Lab, and the University of California at San Diego, this innovative platform was unveiled at the International Conference on Learning Representations. By embedding fundamental physics principles directly into the simulation, PlasticineLab dramatically accelerates robot learning for real-world objects that bend, stretch, and deform permanently.
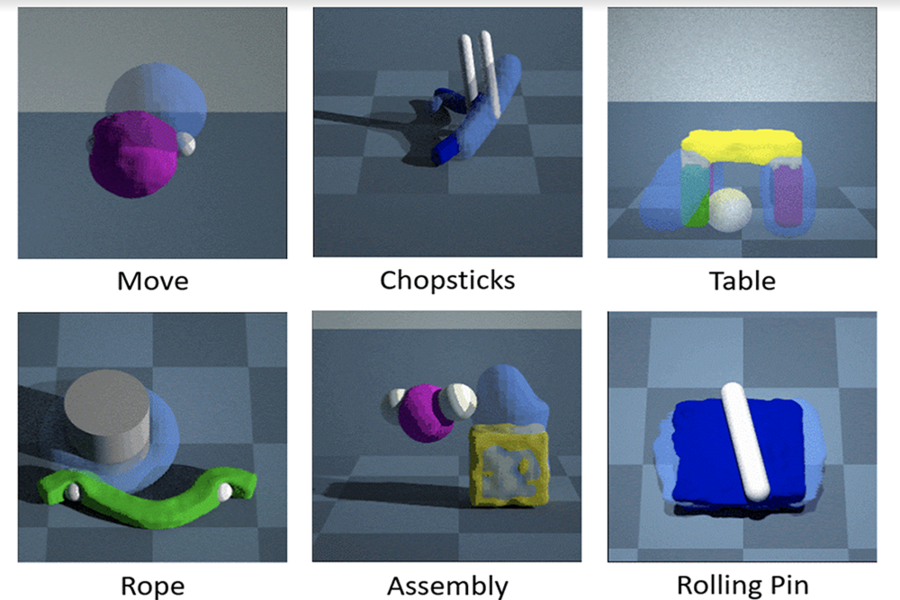
Within this advanced environment, robotic agents master diverse manipulation challenges through simulated interactions with various pliable materials. The RollingPin task teaches agents to flatten dough using pressing or rolling motions; the Rope challenge requires winding a cord around a pillar; while the Chopsticks exercise tests precision in grasping and relocating flexible objects.
The research team demonstrated that their physics-integrated approach enables agents to acquire these skills significantly faster than traditional reinforcement learning methods. By incorporating fundamental physical principles into the simulator's core architecture, they leveraged gradient descent-based optimization techniques to identify superior solutions more efficiently.
"By programming basic physics knowledge into our simulation environment, we've dramatically enhanced the learning efficiency," explains lead researcher Zhiao Huang, former MIT-IBM Watson AI Lab intern and current UC San Diego PhD student. "This approach provides robots with a more intuitive understanding of our physical world, dominated by living organisms and deformable materials."
"Traditional reinforcement learning typically requires thousands of trial-and-error iterations before robots master manipulation tasks," notes senior researcher Chuang Gan from IBM. "Our physics-informed approach enables dramatically faster learning through gradient-based planning algorithms."
The PlasticineLab framework implements fundamental physics equations through Taichi, a specialized graphics programming language. Both Taichi and ChainQueen—the foundation upon which PlasticineLab was built—were developed by study co-author Yuanming Hu SM '19, PhD '21. This implementation allows the robotic agent to continuously evaluate its progress against objectives, enabling rapid course corrections through gradient-based planning algorithms.
"We leverage backpropagation—the same technique used in neural network training—to identify optimal solutions," explains MIT PhD student and co-author Tao Du. "This method provides agents with precise feedback necessary to refine their actions and achieve objectives more efficiently."
This research represents significant progress toward equipping robots with practical common sense, bringing us closer to mechanical systems capable of performing everyday tasks like cooking, cleaning, and laundry folding in real-world environments.
Additional PlasticineLab contributors include Siyuan Zhou from Peking University, Hao Su from UCSD, and MIT Professor Joshua Tenenbaum.

