
Humans possess an innate ability for seamless collaboration, especially when engaged in physical tasks like lifting heavy objects together. Our natural coordination allows us to work in harmony, constantly adjusting our movements to match our partners without explicit communication.
Unlike human collaboration, traditional robots and computers have struggled to achieve this level of intuitive cooperation. Most robotic systems require explicit programming or voice commands to function, limiting their effectiveness in collaborative physical tasks.
Researchers at MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) have revolutionized this landscape with their groundbreaking RoboRaise system. This innovative human-robot collaboration lifting system enables machines to assist people in lifting objects by monitoring their muscle movements through advanced AI technology.
The RoboRaise system utilizes cutting-edge electromyography (EMG) sensors placed on the user's biceps and triceps to monitor muscle activity. Sophisticated algorithms continuously detect changes in the person's arm position and interpret specific up-and-down hand gestures for precise motor control.
The research team demonstrated the system's capabilities through various tasks involving the assembly of aircraft components. During experiments, users successfully controlled the robot to within inches of desired heights by simply lifting and tensing their arm. The system showed even greater accuracy when users incorporated gestures, with the robot responding correctly to approximately 70% of all gestures.
Joseph DelPreto, the lead graduate student on the project, envisions numerous applications for this biceps controlled robotic assistance technology. "Our approach aims to make lifting objects with a robot as intuitive as working with another person," DelPreto explains. "The key breakthrough is using nonverbal muscle signals that encode coordination instructions, making the robot feel like an extension of your own body that you can fluidly control."
This groundbreaking project builds upon the team's previous work that allowed users to correct robot mistakes using brainwaves and hand gestures. "We're developing human-robot interaction where the robot adapts to the human, not the other way around," says MIT Professor and CSAIL Director Daniela Rus. "This transforms the robot into an intelligent tool for physical work."
Working with EMG signals presents unique challenges due to their inherent noise and the difficulty of predicting limb movement based solely on muscle activity. RoboRaise overcomes these obstacles by putting the human in complete control through noninvasive, on-body sensors that detect neuron firing as muscles tense or relax.
The system's algorithm processes biceps activity to estimate arm movement, allowing the robot to mirror the user's actions. Users can make slight adjustments by tensing or relaxing their arm to move the robot up or down. For more precise control, users can employ specific gestures that a neural network detects based on biceps and triceps activity.
One of RoboRaise's most impressive features is its quick setup time. New users can start using the system with minimal calibration—simply by tensing and relaxing their arm a few times and lifting a light weight to different heights. The gesture-detecting neural network is trained on data from previous users, eliminating the need for extensive individual training.
The research team conducted comprehensive testing with 10 users across three different lifting scenarios: one where the robot remained stationary, another where the robot responded to muscle signals without assisting in lifting, and a third where the human and robot lifted objects together. Results showed significantly improved accuracy when users received visual feedback from the robot or when engaged in collaborative lifting.
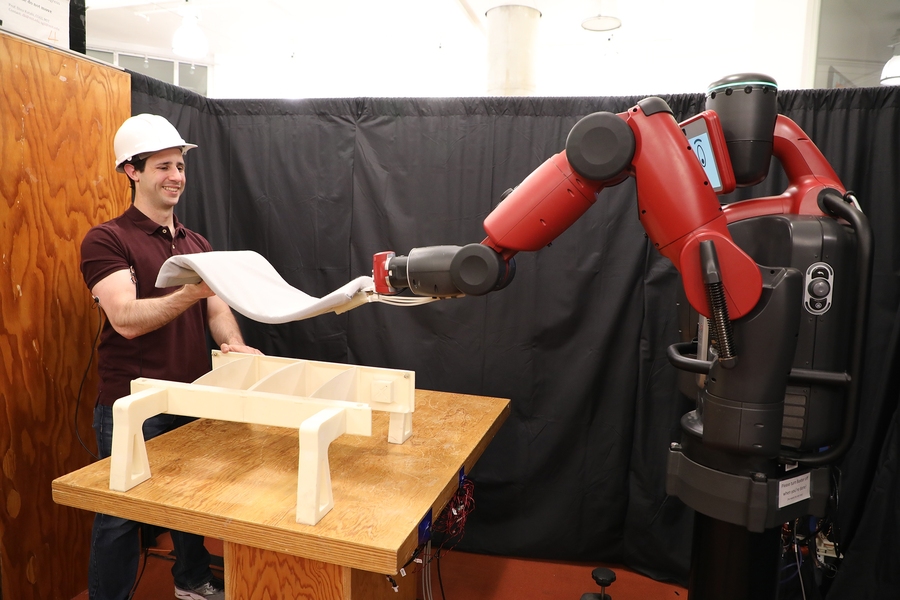
Beyond simple lifting tasks, the team successfully tested RoboRaise on assembly operations, including lifting both rigid and flexible materials onto base structures. While implemented on a Baxter humanoid robot, the EMG sensors for robotic automation technology can be adapted to virtually any robotic platform.
Looking ahead, the research team plans to enhance the system by incorporating additional muscles and different sensor types to increase the degrees of freedom for more complex tasks. They're also exploring how muscle signals indicating exertion or fatigue could enable robots to provide even more intuitive assistance. One experimental version uses biceps and triceps measurements to determine how stiffly a person is holding an object, enabling fluid dragging or rigid pulling actions.
The team will present their revolutionary findings at the International Conference on Robotics and Automation in Montreal, Canada. This transformative project, partially funded by The Boeing Company, represents a significant leap forward in the field of human-robot collaboration and AI-powered assistance technology.

