
Manipulating slender, flexible objects such as ropes, wires, and cables presents significant challenges even for human dexterity. For robotic systems, these tasks become exponentially more difficult due to the dynamic nature of flexible objects. When cables slide between robotic fingers, their configuration continuously transforms, demanding real-time sensing and constant adjustments by the AI-powered robotic system to maintain control over the cable's position and movement.
Conventional robotic methods have historically relied on gradual deformations and rigid mechanical fixtures to handle flexible objects, often resulting in inefficient and time-consuming processes. In a groundbreaking development, researchers from MIT's prestigious Computer Science and Artificial Intelligence Laboratory (CSAIL) in collaboration with the MIT Department of Mechanical Engineering have revolutionized this field by approaching the challenge from a human-inspired perspective. Their innovative system employs dual soft robotic grippers equipped with cutting-edge high-resolution tactile sensors, enabling remarkable dexterity in manipulating freely moving cables without the need for additional mechanical constraints.
The potential applications of this advanced AI-driven robotic system span across numerous sectors, from industrial manufacturing environments to everyday household assistance. This technology paves the way for robots to perform intricate tasks previously reserved for human hands, including knot tying, precision wire shaping, and even delicate surgical suturing procedures, potentially transforming how we approach automation in various fields.
The development process began with the creation of an innovative two-fingered gripper designed specifically for handling flexible objects. These opposing fingers feature a lightweight construction with rapid response capabilities, enabling precise, real-time adjustments of both force and positioning during manipulation tasks. At the fingertips, the researchers integrated advanced vision-based "GelSight" sensors—sophisticated devices crafted from soft rubber and embedded with high-resolution cameras. This intelligent gripper assembly is mounted on a robotic arm that functions as an integral component of the comprehensive control system.
Following the hardware development, the research team engineered a sophisticated perception-and-control framework specifically designed for advanced cable manipulation. The perception component leverages the GelSight sensors' capabilities to accurately estimate the cable's pose between the fingers while simultaneously measuring frictional forces generated during sliding movements. The control system operates through two synchronized controllers: one dynamically modulates grip strength to ensure optimal contact, while the other continuously adjusts the gripper's pose to maintain secure cable retention throughout manipulation tasks.
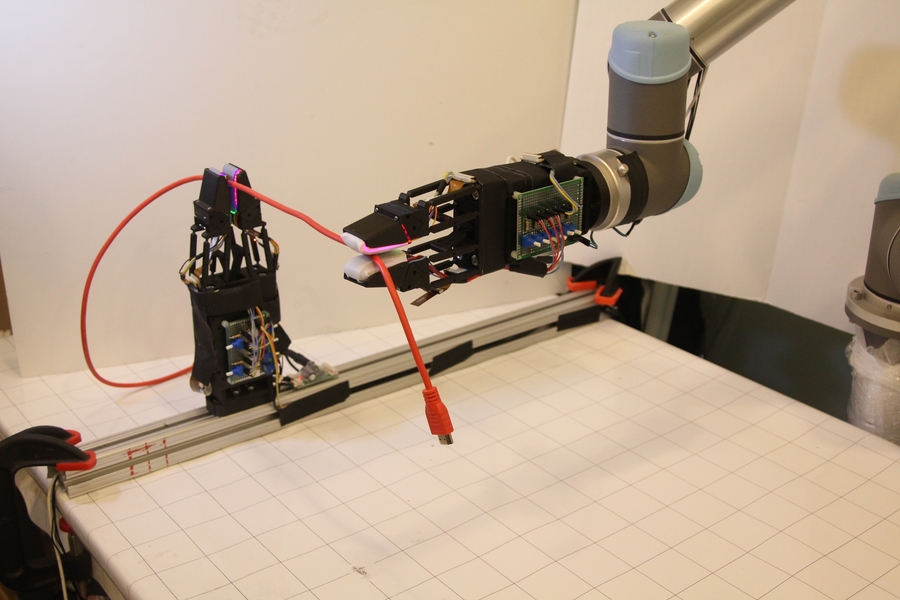
During experimental testing, the arm-mounted gripper demonstrated remarkable capability by successfully tracking a USB cable's path from random initial grasp positions. When enhanced with a second gripper, the system achieves human-like "hand over hand" cable manipulation, efficiently locating cable ends without visual guidance. The AI-driven system also showcased impressive adaptability, seamlessly adjusting its manipulation strategy to accommodate cables of varying materials, thicknesses, and physical properties.
In a compelling demonstration of its advanced capabilities, the robotic system successfully executed a complex task that humans perform daily: connecting earbuds to a mobile device. Beginning with a freely suspended earbud cable, the AI-powered robot skillfully slid the cable between its fingers, precisely detected when the plug made contact with its sensors through tactile feedback, made fine adjustments to the plug's orientation, and ultimately accomplished the challenging task of inserting the plug into the jack with remarkable accuracy.
"The manipulation of soft objects represents a fundamental aspect of our daily activities, encompassing tasks such as cable handling, fabric folding, and string knotting," explains Yu She, MIT postdoc and lead author of the research paper detailing this innovative system. "There exists significant potential for robotic systems to assist humans in performing these manipulation tasks, particularly in scenarios involving repetitive operations, monotonous procedures, or hazardous environments where human safety might be compromised."
The Complexities of Cable Manipulation
The challenge of effective cable manipulation stems from two primary technical hurdles. The first involves precise control of "grasp force"—essential for facilitating smooth sliding movements—alongside maintaining optimal "grasp pose" to prevent cable slippage from the gripper's fingers. Acquiring this critical information presents significant difficulties for traditional vision systems during continuous manipulation operations, as visual data is frequently obstructed, computationally expensive to process in real-time, and potentially unreliable for fine motor control applications.
Furthermore, vision-only sensor systems cannot directly capture the nuanced data required for delicate manipulation tasks, necessitating the research team's implementation of advanced tactile sensors. The gripper's joint design incorporates flexibility as a key feature, providing inherent protection against potential impacts and enhancing the system's durability during operational use.
The sophisticated algorithms powering this system demonstrate remarkable versatility, with the capability to generalize across different cable types exhibiting diverse physical properties—including variations in material composition, stiffness characteristics, and diameter dimensions. Additionally, these algorithms maintain effectiveness across different manipulation speeds, highlighting the system's adaptability to various operational requirements.
Comparative testing of various control approaches applied to the research team's gripper system revealed that their novel control policy significantly outperformed three alternative methods, successfully maintaining cable control over substantially longer distances. Notably, the conventional "open-loop" controller achieved only 36% coverage of the total cable length, frequently losing control when the cable curved, and requiring numerous regrasping attempts to complete manipulation tasks—highlighting the superior efficiency of the newly developed approach.
Future Directions and Improvements
During their research, the team identified a specific limitation: retrieving the cable when it reached the finger's edge proved challenging due to the convex surface design of the GelSight sensor. Addressing this issue, the researchers plan to refine the finger-sensor geometry in future iterations, aiming to optimize the overall performance and reliability of the manipulation system.
Looking forward, the research team intends to expand their investigation into more sophisticated cable manipulation challenges, including complex routing scenarios and insertion operations through various obstacles. Their long-term vision includes exploring applications for autonomous cable manipulation systems within the automotive industry, potentially revolutionizing manufacturing processes and assembly operations through advanced AI-driven robotics.
The research paper detailing this groundbreaking system was authored by Yu She in collaboration with a distinguished team of MIT researchers, including PhD candidates Shaoxiong Wang, Siyuan Dong, and Neha Sunil. The research team also featured Alberto Rodriguez, MIT associate professor of mechanical engineering, and Edward Adelson, who holds the prestigious John and Dorothy Wilson Professorship in the MIT Department of Brain and Cognitive Sciences.
This innovative research initiative received generous support from several prominent organizations, including the Amazon Research Awards program, the Toyota Research Institute, and the Office of Naval Research, demonstrating broad interest in advancing robotic manipulation technologies across both commercial and governmental sectors.

