
In a groundbreaking November 2018 appearance, MIT Professor Sangbae Kim showcased the remarkable mini cheetah robot on "The Tonight Show's" robotics segment. The astonishing display featured the four-legged machine performing yoga poses, recovering from falls, and executing flawless backflips, all while being expertly controlled by Benjamin Katz '16, SM '18 from behind the scenes.
For Katz, this national television moment represented nearly five years of dedication and innovation in the field of advanced robotics.
Katz's journey began during his undergraduate studies at MIT, where he pursued mechanical engineering through the flexible Course 2A program with a focus on controls, instrumentation, and robotics. After his first year, he reached out to Professor Kim and secured a position in the Biomimetic Robotics Lab through MIT's Undergraduate Research Opportunities Program (UROP). His pioneering research explored adapting high-performance components from the electronics hobby market for robotics applications. "I discovered incredibly powerful motors designed for remote control aircraft and drones that nobody was utilizing in robotics," Katz explains.
Professor Kim was immediately struck by Katz's exceptional engineering capabilities.
"Ben possesses an extraordinary range of engineering expertise spanning structural design, motor dynamics, power electronics, and classical control—areas typically requiring four to five specialized engineers," Kim remarks.
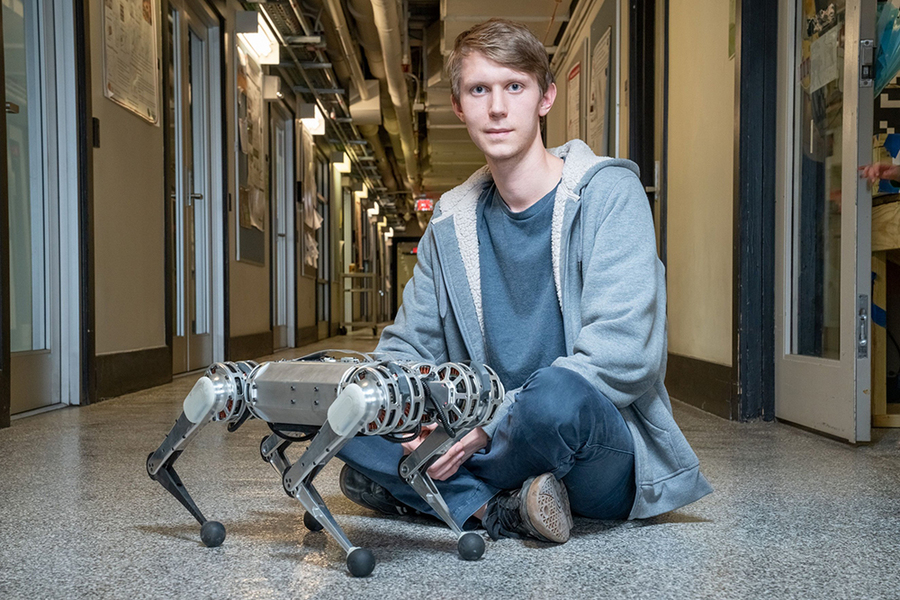
While pursuing his master's degree in mechanical engineering at MIT, Katz continued his groundbreaking work in Kim's laboratory, developing innovative actuator solutions for robotics. During development of the third-generation Cheetah 3 robot, Katz and his colleagues pivoted toward creating a more compact version of the machine.
"A smaller robot offers numerous advantages: easier maintenance, lower costs, and enhanced safety for solo operation," Katz notes. "While not always practical for real-world deployment, the controllers, software, and research findings can be directly applied to larger robots capable of handling substantial payloads."
Leveraging his undergraduate research, Katz and the team incorporated twelve drone motors into the joints of the small quadruped robot, creating what would become known as the "mini cheetah."
With this compact platform, Katz focused on enhancing the mini cheetah's agility and resilience. Collaborating with then-EECS student Jared Di Carlo '19, Mng '20, Katz developed advanced locomotion control systems. In Professor Russ Tedrake's Underactuated Robotics class, the pair tackled the challenge of enabling the mini cheetah to perform safe backflips from a crouched position.
"Creating the backflip capability involved solving a massive offline optimization problem," Katz explains.
Through offline nonlinear optimization techniques, they successfully programmed the mini cheetah to crouch and execute a complete 360-degree rotation around its axis.
While advancing the cheetah project, Katz simultaneously pursued various engineering endeavors as personal projects. One notable achievement was developing a record-breaking Rubik's Cube-solving robot in collaboration with Di Carlo at MIT's community makerspace, MITERS. Their machine solved the puzzle in an astonishing 0.38 seconds.
"The Rubik's Cube solver was purely a passion project during MIT's Independent Activities Period," Katz recalls. "We designed custom actuators for each face of the cube and incorporated webcams for color recognition and block manipulation."
Katz documented his diverse projects on his "build-its" blog, which garnered a substantial following. His creations included planar magnetic headphones, a desktop Furuta pendulum, and an electric travel ukulele.
"Throughout his time at MIT, Ben was constantly building, analyzing, and innovating beyond our lab and classroom requirements," Kim observes. "His relentless passion for learning and creating is truly exceptional."
After completing his master's degree in 2018, Katz served as a technical associate in Kim's lab before joining Boston Dynamics in 2019.
As a designer at Boston Dynamics, Katz transitioned from cheetah-inspired robots to humanoid systems, contributing to the ATLAS project—widely recognized as the "world's most dynamic humanoid robot." Similar to the mini cheetah, ATLAS demonstrates extraordinary capabilities, including backflips and parkour maneuvers.
While the mini cheetah's yoga poses and ATLAS's parkour skills may seem like entertainment for late-night television, Katz emphasizes that these machines address critical real-world challenges. These robots could eventually navigate environments too hazardous for humans, including burning buildings and disaster zones, potentially revolutionizing emergency response and lifesaving operations.
"Our work in Sangbae's lab is helping transform these machines into practical, ubiquitous products that will serve genuine needs in the real world," Katz concludes.

