
In the rapidly evolving field of robotics, artificial intelligence has equipped machines with human-like senses such as vision, touch, and even olfactory capabilities. However, researchers at MIT are pushing the boundaries even further. "We've moved beyond giving robots human-like perception to providing them with superhuman abilities," explains MIT Associate Professor Fadel Adib. His team's latest innovation represents a significant leap forward in robotic sensory technology.
The groundbreaking development is an AI-powered robot named RF-Grasp that utilizes radio frequency technology to detect objects hidden from view. Unlike traditional optical systems, radio waves can penetrate walls and other barriers, giving this remarkable machine what can only be described as superhuman perception. By combining this advanced RF sensing with conventional computer vision, RF-Grasp can locate and retrieve items that would otherwise be inaccessible. This revolutionary technology holds immense potential for applications in e-commerce fulfillment centers and various industrial settings where robots must navigate complex, cluttered environments.
The research findings will be unveiled at the prestigious IEEE International Conference on Robotics and Automation. Led by Tara Boroushaki from MIT's Signal Kinetics Group, the research team includes notable experts such as Fadel Adib, Alberto Rodriguez from the Department of Mechanical Engineering, along with collaborators from Harvard University and Georgia Tech.
As the e-commerce sector continues its exponential growth, warehouse operations remain predominantly human-driven, despite the often challenging and sometimes hazardous working conditions. This reliance on human labor stems largely from the limitations of current robotic technology, particularly when it comes to identifying and manipulating objects in crowded, complex spaces. "Perception and picking represent two of the most significant obstacles preventing widespread robotic adoption in warehouse environments," notes Rodriguez. Traditional vision-based systems fall short when items are concealed within containers or obscured behind other objects, as visible light cannot penetrate opaque barriers.
Radio frequency technology, however, operates on entirely different principles. For decades, RF identification has been successfully employed to track everything from library materials to household pets. These systems typically consist of two primary components: a reader and a tag. The tag, essentially a miniature computer chip, is affixed to or embedded within the item being tracked. When the reader emits an RF signal, the tag modulates this signal and reflects it back, carrying information about the item's location and identity.
The widespread adoption of RF technology in retail supply chains has created an opportunity for innovation in robotics. "RF represents a fundamentally different sensing modality compared to vision," explains Rodriguez. "It would be a significant oversight not to explore its potential applications in robotics."
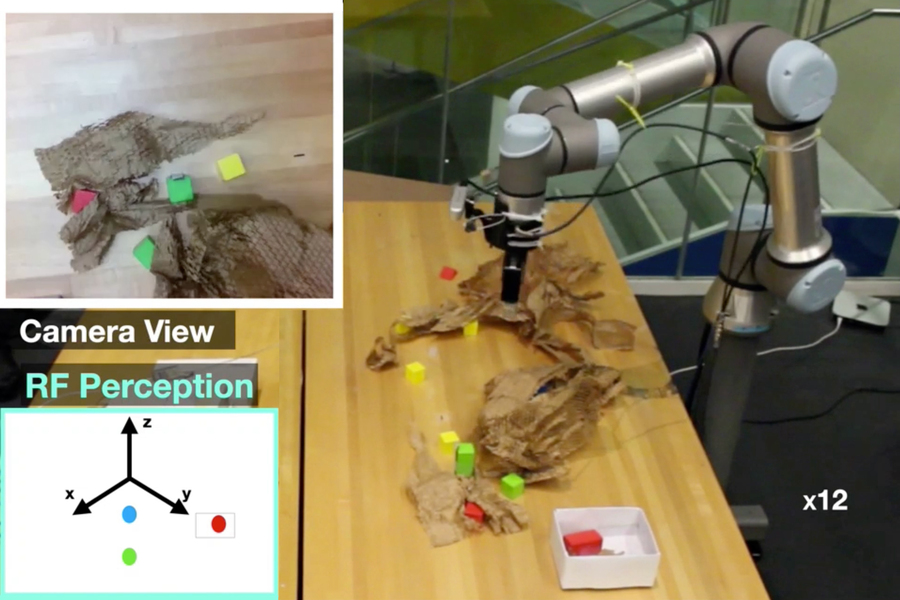
RF Grasp represents a sophisticated integration of both camera and RF reader technologies, enabling it to locate and retrieve tagged objects even when completely obscured from visual detection. The system consists of a robotic arm equipped with a grasping mechanism, with the camera positioned on the robot's wrist. The RF reader operates independently, continuously transmitting tracking data to the robot's control algorithm. This dual-input system requires the robot to constantly process both RF tracking information and visual data about its environment—a complex integration challenge that the research team successfully overcame.
"At any given moment, the robot must determine which data stream deserves greater attention," explains Boroushaki. "We're dealing not just with eye-hand coordination, but with RF-eye-hand coordination, which significantly complicates the decision-making process."
The object retrieval process begins with the robot emitting a signal to the target's RF tag, establishing its general location. "The system initially uses RF to direct the attention of the vision system," Adib describes. "Once the object is approximately located, vision takes over for precise navigation and manipulation." This process resembles hearing a siren and then turning to visually identify its source.
Through its complementary sensing capabilities, RF Grasp precisely homes in on the target object. As the robot approaches and begins manipulating the item, the vision system—which provides significantly greater detail than RF—becomes the dominant input for decision-making.
In comprehensive testing, RF Grasp demonstrated remarkable efficiency advantages over vision-only systems. It was able to locate and grasp target objects with approximately half the movement required by traditional camera-equipped robots. Furthermore, RF Grasp exhibited a unique ability to "declutter" its environment—removing obstacles such as packaging materials to access the target. Rodriguez highlights this capability as RF Grasp's "unfair advantage" over systems without penetrative sensing capabilities. "It possesses a guidance system that other approaches simply lack."
The potential applications for RF Grasp extend beyond warehouse automation. The technology could revolutionize inventory verification processes, eliminating the need to physically manipulate items to scan barcodes. "RF technology has the potential to address some of the most significant limitations in current industrial systems, particularly in perception and localization," Rodriguez observes.
Adib also envisions numerous domestic applications for this technology, from locating the appropriate tool for furniture assembly to finding misplaced items. "Imagine a super-Roomba that could retrieve your keys regardless of where you left them," he suggests.
This groundbreaking research has been made possible through support from the National Science Foundation, NTT DATA, Toppan, Toppan Forms, and the Abdul Latif Jameel Water and Food Systems Lab (J-WAFS).

