
Even the most sophisticated robots still struggle to match the dexterity of a one-year-old child. While modern machines excel at basic pick-and-place operations, they fall short when it comes to replicating the natural exploratory behaviors and sophisticated manipulation skills that humans possess intuitively.
In the quest to bridge this gap, leading artificial intelligence research organizations have developed innovative solutions. OpenAI introduced Dactyl, their humanoid robotic hand that solved Rubik's cubes using advanced software representing a leap toward more generalized intelligence. Similarly, DeepMind developed RGB-Stacking, a vision-based system enabling robots to master the complex task of grasping and stacking various objects.
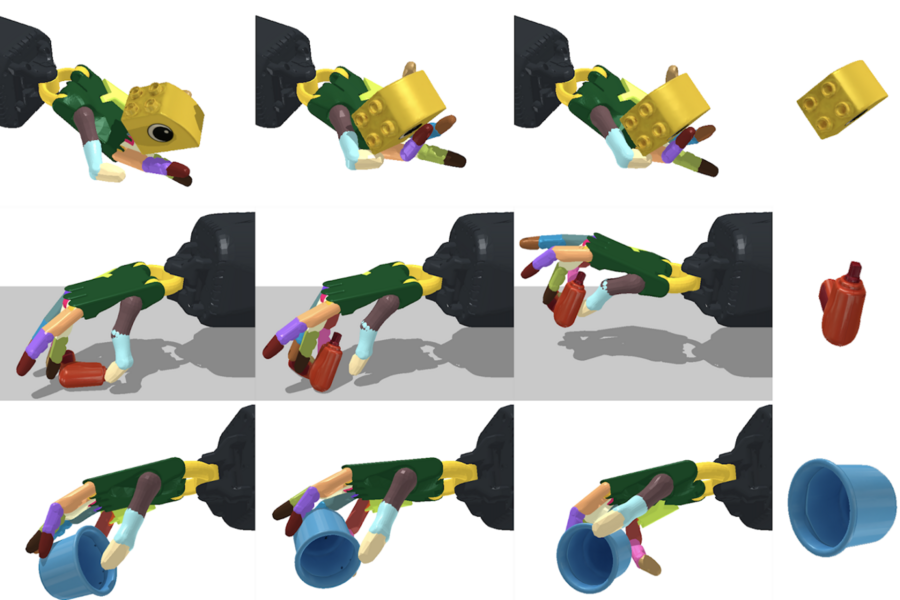
Now, researchers from MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) have made a groundbreaking advancement with a highly scalable framework capable of reorienting more than 2,000 different objects using a robotic hand that operates effectively in both upward and downward positions. This remarkable ability to manipulate items ranging from kitchen utensils to food packaging enables precise pick-and-place operations in specific orientations and locations—even extending to objects the system has never encountered before.
This exceptional manipulation capability—traditionally limited to single tasks and upright orientations—promises to revolutionize logistics and manufacturing workflows. The technology addresses common industrial challenges such as precise kitting operations and expands the range of tools robots can handle with dexterity. The research team implemented their system using a simulated anthropomorphic hand featuring 24 degrees of freedom, demonstrating promising potential for future real-world robotic applications.
"Industrial settings predominantly rely on parallel-jaw grippers due to their control simplicity, but these tools physically cannot handle many everyday items," explains Tao Chen, MIT CSAIL PhD student from the Improbable AI Lab and lead researcher on the project. "Even basic tasks like using pliers become challenging because conventional grippers can't dexterously manipulate handles back and forth. Our system enables multi-fingered hands to handle such tools skillfully, opening exciting new possibilities for robotics applications."
The challenge of in-hand object reorientation has long perplexed robotics experts due to the complex coordination of multiple motors and constantly changing contact points between fingers and objects. With the system needing to master over 2,000 different items, the learning task was particularly formidable.
The complexity intensifies significantly when the hand operates in downward orientations, requiring the robot to not only manipulate objects precisely but also counteract gravity to prevent dropping them.
The research team discovered that an elegantly simple approach could solve these complex problems. They implemented a model-free reinforcement learning algorithm combined with deep learning techniques and an innovative "teacher-student" training methodology.
In this framework, the "teacher" network trains on information readily available in simulation environments but difficult to obtain in real-world settings, such as fingertip positions and object velocity. To ensure practical applicability, the teacher's knowledge is distilled into observable real-world data like depth images from cameras, object poses, and robot joint positions. The team also implemented a "gravity curriculum" where the robot first masters skills in zero-gravity conditions before gradually adapting to normal gravity—a method that significantly enhanced overall performance.
Contrary to expectations, a single controller (essentially the robot's brain) could successfully reorient numerous objects it had never previously encountered, without requiring specific knowledge about their shapes.
"We initially assumed that visual perception algorithms for determining object shape during manipulation would present the primary challenge," notes MIT Professor Pulkit Agrawal, a co-author of the research paper. "Surprisingly, our results demonstrate that robust shape-agnostic control strategies can be learned. This suggests that visual perception might be less crucial for manipulation than traditionally believed, and simpler perceptual processing approaches may prove sufficient."
The system achieved nearly perfect success rates with small, circular objects like apples, tennis balls, and marbles in both hand orientations. As expected, more complex items such as spoons, screwdrivers, and scissors proved more challenging, with success rates around 30%.
Looking ahead, the research team plans to refine the system by training models based on object shapes to improve performance, particularly for more complex items. This advancement represents another significant step toward creating truly dexterous robotic manipulation systems that can operate effectively in real-world environments.
The research paper was authored by Tao Chen, MIT CSAIL PhD student Jie Xu, and MIT Professor Pulkit Agrawal. Funding was provided by Toyota Research Institute, Amazon Research Award, and DARPA Machine Common Sense Program. The findings will be presented at the 2021 Conference on Robot Learning (CoRL).

