
AI-Driven Advancements in Social Awareness for Autonomous Vehicles
Revolutionary advancements in artificial intelligence are transforming the capabilities of autonomous vehicles, addressing one of the most significant challenges in self-driving technology: social awareness. While modern self-driving cars boast impressive sensor arrays and sophisticated data processing abilities, they fundamentally lack the intuitive social understanding that even novice human drivers possess.
Current autonomous technologies continue to treat surrounding vehicles merely as data points—obstacles to be calculated and navigated around—rather than recognizing them as entities operated by humans with unique intentions, motivations, and behavioral patterns.
In a groundbreaking development, scientists at MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) have pioneered research into programming autonomous vehicles to classify the social personalities of other drivers. This innovative approach enables self-driving cars to more accurately anticipate the actions of various vehicles, significantly enhancing safety in complex traffic environments.
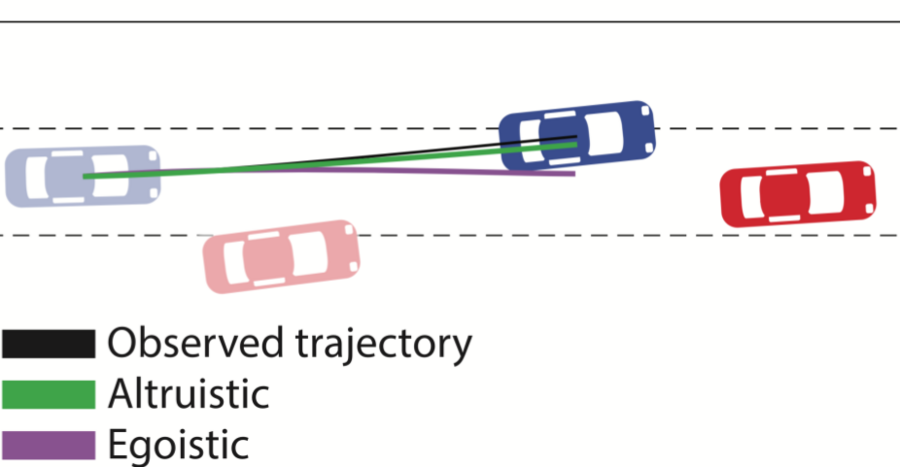
The research team, publishing their findings in the Proceedings of the National Academy of Sciences, integrated principles from social psychology to categorize driving behaviors based on selfishness versus selflessness. Their system employs Social Value Orientation (SVO), a psychological framework that distinguishes between egoistic (self-focused) and prosocial (cooperative or altruistic) tendencies. By analyzing these behavioral patterns, the technology generates real-time driving trajectories for autonomous vehicles.
When tested in challenging scenarios such as lane merging and unprotected left turns, the algorithm demonstrated a remarkable 25% improvement in predicting the behavior of other vehicles. For instance, during left-turn simulations, the autonomous vehicle could accurately determine when to yield for approaching vehicles with egoistic drivers and proceed safely when encountering more prosocial drivers.
Though not yet ready for real-world implementation, this technology presents intriguing possibilities beyond just autonomous vehicles. Human drivers could benefit from warnings about aggressive drivers in their blind spots, allowing for timely adjustments. Additionally, self-driving cars could learn to exhibit more human-like behaviors that are more easily understood by human operators.
"Understanding human intentions is fundamental to developing autonomous systems that can safely interact with people," explains Wilko Schwarting, the graduate student who led the research. "The collaborative or competitive tendencies that people exhibit in social situations often extend to their driving behavior. Our research sought to quantify these tendencies mathematically."
The research team, including MIT professors Sertac Karaman and Daniela Rus, along with research scientist Alyssa Pierson and former CSAIL postdoc Javier Alonso-Mora, identified a critical limitation in current autonomous vehicles: their programming assumes uniform human behavior. This assumption results in overly conservative decision-making at intersections and other traffic scenarios.
While this cautious approach reduces accident risks, it creates traffic bottlenecks that frustrate other drivers and can lead to misunderstandings. This may explain why many traffic incidents involve autonomous vehicles being rear-ended by impatient human drivers.
"Developing more human-like behavior in autonomous vehicles is essential for passenger safety and harmonious integration with human-driven traffic," notes Schwarting. "Predictable behavior enables humans to understand and appropriately respond to autonomous vehicles' actions."
To enhance the social awareness of autonomous vehicles, the CSAIL team combined social psychology methodologies with game theory, creating a framework for modeling competitive social scenarios. Their approach models road situations where each driver seeks to maximize their own utility, analyzing the "best responses" based on the decisions of all other agents.
Using brief observations of other vehicles' movements, the algorithm can predict whether surrounding drivers exhibit cooperative, altruistic, or egoistic tendencies—grouping the first two categories as "prosocial." These behavioral traits exist on a continuum reflecting how individuals balance self-interest with consideration for others.
In merging and left-turn scenarios, the system evaluates whether to allow another vehicle to merge (prosocial behavior) or not (egoistic behavior). As expected, the research found that vehicles attempting to merge typically display more competitive behavior than those maintaining their lanes.
The system was trained to recognize when different behavioral responses are appropriate. Even the most courteous human drivers understand that certain maneuvers—like changing lanes in heavy traffic—require moments of assertiveness and decisiveness.
Looking ahead, the research team plans to extend their model to pedestrians, bicycles, and other agents in driving environments. They also aim to explore applications in other robotic systems that interact with humans, such as household robots, by integrating SVO into their prediction and decision-making algorithms. Pierson emphasizes that the ability to estimate SVO distributions from observed movements, rather than laboratory conditions, could have implications far beyond autonomous driving.
"By mathematically modeling driving personalities and incorporating these models into the decision-making processes of autonomous vehicles, this research paves the way for safer and more seamless road-sharing between human-driven and robot-driven cars," explains Rus.
The MIT team's research received support from the Toyota Research Institute, while the Netherlands Organization for Scientific Research provided funding for Mora's participation in the project.

